
8 Design and Development of Micromouse Robot
Vishwas Bedekar
1) Micromouse Robot
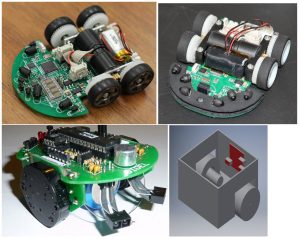
A micromouse robot is a completely autonomous robot that can navigate and solve a maze without any externally controlled movements. In a competition, the shape and design of the maze is randomized and the micromouse must apply a strategy using various algorithms to solve the maze and navigate it in the least amount of time. The competition rule would establish the width of the path, length and the target. In some cases, the robot has to navigate from one of the corners to the center of the maze, whereas in some cases, the robot has to navigate from one corner to the other corner of the maze. There is a size limit to the micromouse however, there is no weight limit. Figure 8.1 below shows various designs of the micromouse maze solving robot.
A beginner’s guide for building a simple micromouse robot can be found at Micro Mouse for Beginners.
The National Robotics Challenge (NRC) Micromouse competition has the following rules, which were originally adopted from official rules of the 1986 North American Micromouse Contest:
- The micromouse robot is not allowed to walk, jump over, fly over, cut, mark, damage, push, or destroy the walls of the maze.
- The micromouse robot must fit within 7 in by 7 in by 7 in volume and must be completely autonomous running on batteries only for power.
- The layout of the maze is based upon 10 in by 10 in square sections that fit into a large area. The wall layout is completely randomized and unknown before the competition begins. The total area of the maze is 100 inches by 100 inches i.e. total of 100 square sections.
- The entire maze is made up of wood and walls are painted white and floor tiles are painted in black.
- No practice sessions are allowed. Each robot gets 10 minutes to solve the maze. The micromouse can take any number of turns ad permutations to solve the maze within the 10 minutes of allocated time. Minimum run time will be recorded for determination of the competition results.
- Any mid run attempts will not be counted once the timer of 10 minutes is finished.
- The programmers are not allowed to feed the layout of the maze to the robot once its revealed.
- In case, none of the robots can solve the maze to the center, then the evaluation will be based on number of squares traveled without touching the walls/completely stopping the robot.
Figure 8.2 below shows an approximate sketch of a randomized maze. The actual maze will be different in the competition and will only be revealed before the first contestant begins the robot runs.

Please take note that the Micromouse maze solving robot is very program-intensive and requires thorough understanding of the algorithms used to solve the maze as efficiently as possible. Below are some of the most common algorithms used to solve a right/left turn maze.
- Wall following algorithm (typically not allowed in Micromouse maze competitions) – In this technique, the robot always keeps contact with the wall and follows it until it solves the maze. It is one of the simplest and easy to implement algorithms.
- A* algorithm – The A-star algorithm is one of the most efficient algorithms to quicky solve a maze where the program combines the cost to reach each node/square and finds the quickest path to the goal by trial-and-error method.
- Dijkstra’s Algorithm – This algorithm calculates the shortest path to the goal tile/square by exploring all possible ways; thus, it guarantees finding the shortest path. However, this technique may take longer time and the micromouse explores all possible pathways and there is limited available time for all runs. For unknown mazes, this may not result in most efficient path finding.
- Random mouse algorithm – In this case, the micromouse robot moves randomly throughout the maze until it finds the destination. This technique may take longer time as the robot may en up moving through the entire maze before finding the center tile. Ultimately, it ma not be able to solve te maze within 10 minutes and may get into continuous loops.
- Flood fill algorithm – In this technique, the micromouse robot calculates all distances from the goal and maps the entire maze to find the shortest path however, it may require lot more memory storage and computing power.
- Simultaneous localization and mapping (SLAM) algorithm – The robot self learns as it explores the maze and builds a real time map of the maze; however, it may require advanced camera and sensors such as LIDAR.
For the NRC competitions, A star algorithm seems to be the most efficient and viable option to solve the maze and achieve a fastest run once the shortest path is determined.
