
7 Design Considerations for a Combat Robot
Vishwas Bedekar
1) Combat Robot
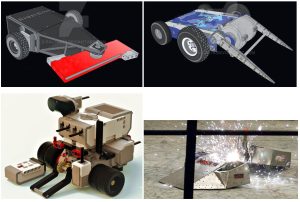
A combat robot or a battlebot is remote controlled fighter robot that enters an arena and indicts physical damage on to the opponent to “knock out” the opponent. The combat arena is enclosed and secured from the operators and the audience. The primary objective of the battlebot is to destroy or disable the opponent within the designated amount of time. The two most important aspects of the combat robot are the robot design and its weapon system. The weapon design of combat robot can be (1) horizontal axis rotor (2) vertical axis rotor (3) hammer (4) pneumatic ram (5) grinder or drill (6) flippers (7) push plate or a pulverizer.
Below are some examples of combat robot designs in Figure 7.1.
Battlebot videos:
Materials selection and 3D printing of battlebot components:
Basic program for remote controlled robot:
#define LEFT_MOTOR_FORWARD 9
#define LEFT_MOTOR_BACKWARD 10
#define RIGHT_MOTOR_FORWARD 11
#define RIGHT_MOTOR_BACKWARD 12
void setup() {
pinMode(LEFT_MOTOR_FORWARD, OUTPUT);
pinMode(LEFT_MOTOR_BACKWARD, OUTPUT);
pinMode(RIGHT_MOTOR_FORWARD, OUTPUT);
pinMode(RIGHT_MOTOR_BACKWARD, OUTPUT);
}
void loop() {
// Example logic: Move forward
digitalWrite(LEFT_MOTOR_FORWARD, HIGH);
digitalWrite(RIGHT_MOTOR_FORWARD, HIGH);
delay(1000); // Move forward for 1 second
// Stop
digitalWrite(LEFT_MOTOR_FORWARD, LOW);
digitalWrite(RIGHT_MOTOR_FORWARD, LOW);
delay(500);
}
Program for a remote-controlled battlebot spinning weapon can be summarized as below:
#define ESC_PIN 9 // Pin connected to the ESC signal wire
#define RC_SIGNAL_PIN 7 // Pin connected to the RC receiver
void setup() {
pinMode(ESC_PIN, OUTPUT);
pinMode(RC_SIGNAL_PIN, INPUT);
armESC();
}
void loop() {
int rcSignal = pulseIn(RC_SIGNAL_PIN, HIGH); // Read RC signal width
// Map RC signal to ESC speed (assuming RC range is 1000 to 2000 microseconds)
int weaponSpeed = constrain(rcSignal, 1000, 2000);
spinWeapon(weaponSpeed);
}
void armESC() {
spinWeapon(1000); // Send minimum speed to arm the ESC
delay(2000); // Wait for arming sequence
}
void spinWeapon(int speed) {
digitalWrite(ESC_PIN, HIGH);
delayMicroseconds(speed);
digitalWrite(ESC_PIN, LOW);
delayMicroseconds(20000 – speed); // Maintain 20ms period
}
2) Choice of materials for the main body and weight classes
Typically, strong and durable material that can take many impacts/hits is ideal for the battlebot main body. Depending on the budget allocated for the project, it can be made of titanium or steel alloy, aluminum alloy (which is expensive) as well as strong polymer materials such as TPE. A composite material can also be used to improve impact strength and wear resistance of the combat robot. The competitions do have rules and regulations based on the weight and materials class. For example, the ant-weight combat robot can be only made with polymers/plastics such as PETG, ABS plastic, HDPE, PLA, TPE, and the weight must be equal or less than 1 pound for rolling (on wheels) robot. The weight can increase up to 1.5 if any walking motion is derived from rotating motion. The weight further increases to 2 pounds for a non-wheeled robot. More than 90% of the robots competing in competitions use rolling motion that is capped at 1 lb total weight; however, some designers may use the full 2 lb weight with innovative walking/stepping mechanism, completely avoiding wheels. For beetle-weight combat robot similar weight sub classes are allowed – 3 lb for a rolling robot on wheels, 4.5 lb for a shuffle robot or walker derived from rotation and 6 lb limit for a non-wheeled robot. There is no restriction on the materials used for electronic components such as motors, sensors, fasteners, adhesives, axles, but these components can not be used to strengthen the robot body/chassis, armor or weapon.
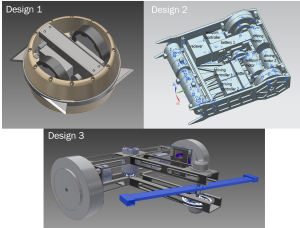
In first and second design, combat robot/battle bot is designed to function the same and without interruption when flipped. This meany that it had to be able to move whether it was right-side-up or not. Another advantage of first design is that all electronic components, wheels, and transmission are protected by a thick envelop of polymer that is strong and impact-resistant. The second design is unique in a way that its body is made up of aluminum alloy, although it still maintains the weight requirement of 3 lbs or less. The clearance of this design is very low so that no other battlebot could get underneath it or flip it or cause mechanical damage on any components. All electronics and wheels are secured inside this metal casing. In third design, the robot incorporates a weight blade weapon that rotates about a fixed axis at the head of the design, and two drive wheels that are positioned in the rear.
Every design will have its advantages and limitations. The robot designer can take into consideration the availability of materials, budget, ease of programing, defense mechanism, weapon design and its effectiveness against other weapon types. There is no “one size fits all” strategy in designing a combat robot.
Please take the following quiz that highlights important features of combat robots.
