
12 Discrete State Space
Hongbo Zhang
1) Overview of Discrete State Space
Discrete state space is a powerful simplification of continuous state space. In some contexts, discrete state space is more useful for numerical computation, allowing us to more easily calculate the values of the states. As long as we can calculate the state values, we can do very powerful things with state space. In a controls context, we can control the system of interest.
2) Conversation of Continuous State Space to Discrete State Space
The conversion of continuous state space to discrete state space begins with the use of Laplace transforms to transform the state space from the time (“t”) domain to the frequency (“s”) domain using the Laplace transform  , as shown in Figure 1. The idea of using the Laplace transform is to solve for the state variables in the frequency domain. As shown in Figure 12.1, the state variable
, as shown in Figure 1. The idea of using the Laplace transform is to solve for the state variables in the frequency domain. As shown in Figure 12.1, the state variable  is obtained through Laplace transform showing a relationship between and
is obtained through Laplace transform showing a relationship between and  . (As a reminder,
. (As a reminder,  is the identity matrix, which is multiplied by s in order to keep the equations in matrix form.)
is the identity matrix, which is multiplied by s in order to keep the equations in matrix form.)
, as shown in Figure 1. The idea of using the Laplace transform is to solve for the state variables in the frequency domain. As shown in Figure 12.1, the state variable is obtained through Laplace transform showing a relationship between and . (As a reminder, is the identity matrix, which is multiplied by s in order to keep the equations in matrix form.)
Following the Laplace transform, we can convert the equations back into the time domain using the inverse Laplace transform. After inverting the Laplace transform, we can obtain the inverse time domain equations of the state space, as shown in Figure 2. It is evident that  is a function of
is a function of  as shown in the bottom of Figure 12.2. However, only knowing is insufficient; we are not yet in the discrete time domain. As such, we need to convert it to the discrete time domain.
as shown in the bottom of Figure 12.2. However, only knowing is insufficient; we are not yet in the discrete time domain. As such, we need to convert it to the discrete time domain.
is a function of as shown in the bottom of Figure 12.2. However, only knowing is insufficient; we are not yet in the discrete time domain. As such, we need to convert it to the discrete time domain.
To convert to the discrete time domain, let us substitute the  with
with ![X[k+1]](https://mtsu.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-ac77b0b319c700a7aca191de0032b046_l3.png "Rendered by QuickLaTeX.com") . Note that once we convert to , we introduce the variables of
. Note that once we convert to , we introduce the variables of  and
and  . While these two symbols are similar to
. While these two symbols are similar to  and
and  , the are actually not the same thing at all. and represent the state transition matrices. State transition matrix means that and can be used to transition the state
, the are actually not the same thing at all. and represent the state transition matrices. State transition matrix means that and can be used to transition the state  to its next time step . Specifically, after integration, becomes
to its next time step . Specifically, after integration, becomes  . By doing this, we have removed the integral here. Thus, it is easier to calculate and using this matrix operation, as shown in the bottom of Figure 12.3.
. By doing this, we have removed the integral here. Thus, it is easier to calculate and using this matrix operation, as shown in the bottom of Figure 12.3.
with . Note that once we convert to , we introduce the variables of and . While these two symbols are similar to and , the are actually not the same thing at all. and represent the state transition matrices. State transition matrix means that and can be used to transition the state to its next time step . Specifically, after integration, becomes . By doing this, we have removed the integral here. Thus, it is easier to calculate and using this matrix operation, as shown in the bottom of Figure 12.3.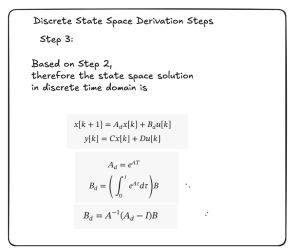
Now we are finally ready to convert the state space equations to the discrete time domain. Specifically, we are interested in solving the discrete time domain for . To solve, we start from the results obtained from Step 3 as shown in Figure 12.3 above. There, we solved for . As shown in Figure 12.4 below, is both iterative and accumulative. As such, we can write easily the equation shown in the middle of the figure. This equation is actually almost the final equation that we want to obtain: it is ! However, this equation looks complicated. Why? It is because in the equation in the middle of Figure 12.4, there is an  term that makes the equation look very complicated and hard to calculate. So we must do one more step to simplify it a bit.
term that makes the equation look very complicated and hard to calculate. So we must do one more step to simplify it a bit.
. To solve, we start from the results obtained from Step 3 as shown in Figure 12.3 above. There, we solved for . As shown in Figure 12.4 below, is both iterative and accumulative. As such, we can write easily the equation shown in the middle of the figure. This equation is actually almost the final equation that we want to obtain: it is ! However, this equation looks complicated. Why? It is because in the equation in the middle of Figure 12.4, there is an term that makes the equation look very complicated and hard to calculate. So we must do one more step to simplify it a bit.
As shown in the bottom of the Figure 12.4, we have fully simplified the equation. This simplification relies again on the state transition matrices:
equation. This simplification relies again on the state transition matrices:

*Note that A and B on the left side of the equation are not the same as A and B on the right side, but for unknown reasons, the convention is to use the same symbols despite the fact that they represent different things. The A and B on the left side of 1. and 2. above correspond to and from Figure 12.3.*
and from Figure 12.3.*
The state transition matrix has successfully removed  from the equation, as shown in Figure 12.4. It makes the calculation much more friendly. Why? It is because it has totally removed time from the equation. In this equation, we have only kept k as the changing value. This exactly matches our calculation goal of , where the only changing value is
from the equation, as shown in Figure 12.4. It makes the calculation much more friendly. Why? It is because it has totally removed time from the equation. In this equation, we have only kept k as the changing value. This exactly matches our calculation goal of , where the only changing value is  . Therefore, we are done with the derivation.
. Therefore, we are done with the derivation.
from the equation, as shown in Figure 12.4. It makes the calculation much more friendly. Why? It is because it has totally removed time from the equation. In this equation, we have only kept k as the changing value. This exactly matches our calculation goal of , where the only changing value is . Therefore, we are done with the derivation.The final equation of is highlighted in the box with red outline shown in the bottom of Figure 12.4. In this equation, we find that the value only relies on k as the changing variable. Other matrices A and B are the state transition matrices, not the original state space A and B, which are the system matrix and the input matrix.
is highlighted in the box with red outline shown in the bottom of Figure 12.4. In this equation, we find that the value only relies on k as the changing variable. Other matrices A and B are the state transition matrices, not the original state space A and B, which are the system matrix and the input matrix.The beauty of this equation is that, as long as we know the original A and B matrices, which are the system matrix and input matrix, we only need to change the value of k to calculate all the values. Therefore, we call it discrete state space. With the discrete state space values of  and k known, we can calculate all the discrete values of . With these discrete values of , it is possible for us to optimize the controller (aka optimize LQR).
and k known, we can calculate all the discrete values of . With these discrete values of , it is possible for us to optimize the controller (aka optimize LQR).
values. Therefore, we call it discrete state space. With the discrete state space values of and k known, we can calculate all the discrete values of . With these discrete values of , it is possible for us to optimize the controller (aka optimize LQR).3) Discussion of Discrete State Space Properties
The discrete solution of the state space is important. Without the discrete solution, we are not able to control the underlying system. It is also very interesting to note that the state transition matrix is particularly important, as noted in Figure 12.5. It shows the state space evolution process, thus providing insights for optimizing the control process.

It is also useful to summarize the derivation process from continuous state space to discrete state space so that we can better understand the entire process. As shown in Figure 12.6, we have the original state space at the top; then following the derivation steps, we obtain the discrete state space. In the discrete state space, the values of and are presented. These are followed by the actual solution of ![X[k]](https://mtsu.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-a9437c3d2a4c28e00b0f9e0f43a1c3df_l3.png "Rendered by QuickLaTeX.com") . For the equation of , we have obtained the following coefficients and . These two coefficients are sufficient for us to calculate the discrete values of X[k] shown in Figure 12.6.
. For the equation of , we have obtained the following coefficients and . These two coefficients are sufficient for us to calculate the discrete values of X[k] shown in Figure 12.6.
and are presented. These are followed by the actual solution of . For the equation of , we have obtained the following coefficients and . These two coefficients are sufficient for us to calculate the discrete values of X[k] shown in Figure 12.6.
We can further simplify the derivation process of continuous state space to discrete state space using only two equations, as shown in Figure 12.7. The top of Figure 12.7 shows the discrete state space ![x[k+1]](https://mtsu.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-4a5c97156de5066f66d6197afae37c60_l3.png "Rendered by QuickLaTeX.com") and
and ![x[k]](https://mtsu.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-88be78b31528bb450106ef8a8ee13b12_l3.png "Rendered by QuickLaTeX.com") . For this equation, and are still the system matrix and input matrix. The solution of the discrete state space is also illustrated in the bottom section of Figure 12.7. In the solution of , however, the symbols of and are not the system and input matrices anymore; instead, they are the state transition matrices used to determine the values of the state space.
. For this equation, and are still the system matrix and input matrix. The solution of the discrete state space is also illustrated in the bottom section of Figure 12.7. In the solution of , however, the symbols of and are not the system and input matrices anymore; instead, they are the state transition matrices used to determine the values of the state space.
and . For this equation, and are still the system matrix and input matrix. The solution of the discrete state space is also illustrated in the bottom section of Figure 12.7. In the solution of , however, the symbols of and are not the system and input matrices anymore; instead, they are the state transition matrices used to determine the values of the state space.
In the above derivation, it is possible that you may have felt confused about the derivation process of the Laplace transform, especially when it is used to calculate the Laplace transform of two functions multiplied together, as shown in Figure 12.8 below. This figure provides a review of the Laplace transform multiplication rule. This rule is critical when performing step 2 of the derivation for transforming the continuous state space to discrete state space (as in Figure 12.2 earlier).

4) Examples of Discrete State Space Computation
Hopefully, through the above steps, you now have a good understanding of the conversion of continuous state space to discrete state space. Now, it is time for us to illustrate the discrete state space calculation with some examples. Through these examples, you will understand how to actually use the discrete state space to do some meaningful tasks.
Figure 12.9 shows a simple example, where the coefficients A=0.9 and B=0.1. In this example, one can see that the calculation of the value of is iterative. It means that the value is dependent on the ![x[k-1]](https://mtsu.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-74dfe554a4f96b89e9c4cbebdf4985d8_l3.png "Rendered by QuickLaTeX.com") value. As such, the value is actually a summation of all values of the previous states.
value. As such, the value is actually a summation of all values of the previous states.
is iterative. It means that the value is dependent on the value. As such, the value is actually a summation of all values of the previous states.From a control perspective, this is actually very interesting. It means that we need some control mechanisms to ensure that these accumulation effects will not make our control system diverge (go out of control). For PID control, we use an integral gain to accomplish this objective. For the first example, when A=0.9 and B=0.1, we can see that this will yield a constant value of . It means that the value of is just a constant number that will never change.
. It means that the value of is just a constant number that will never change.
The second example also shows a simple example, where the coefficients A=0.7 and B=-9, shown in Figure 12.10. Apparently, with A=0.7 and B=-9, the values of keep increasing. Therefore, this means that the underlying state space is unstable. In order to make the underlying system stable, we have to change the values of A and B. The use of feedback actually will be able to change A and B, therefore make the system stable.
keep increasing. Therefore, this means that the underlying state space is unstable. In order to make the underlying system stable, we have to change the values of A and B. The use of feedback actually will be able to change A and B, therefore make the system stable.
Figure 12.11 shows another simple example, where the coefficients A=0.9 and B=0.2. Apparently, with A=0.9 and B=0.2, the values of still keep increasing, but at a much smaller rate. This means that the underlying state space is still unstable, but it is much smoother and less wild in terms of the unstable dynamics. This helps us to gain some confidence that changing the and values is indeed useful to make the system more controllable and achieve a steady state.
still keep increasing, but at a much smaller rate. This means that the underlying state space is still unstable, but it is much smoother and less wild in terms of the unstable dynamics. This helps us to gain some confidence that changing the and values is indeed useful to make the system more controllable and achieve a steady state.
